2008年11月25日 星期二
2008年11月23日 星期日
2008年11月17日 星期一

2008年11月13日 星期四

2008年11月12日 星期三
红外线遥控器解码程序
这里我们以红外线遥控编码芯片为uPD6121G(或者是
HT622、7461等芯片)为例来说明用单片机实现红外遥控解码的详细过程,站长琢磨这个解码程序花了相当多的精力,期间几经修改逐步完善,后来还用它开发了几个小产品,希望能对网友学习单片机有所帮助。
红外线遥控是目前使用最广泛的一种通信和遥控手段。由于红外线遥控装置具有体积小、功耗低、功能强、成本低等特
点,因而,继彩电、录像机之后,在录音机、音响设备、空凋机以及玩具等其它小型电器装置上也纷纷采用红外线遥控。工业设备中,在高压、辐射、有毒气体、粉
尘等环境下,采用红外线遥控不仅完全可靠而且能有效地隔离电气干扰。
1 红外遥控系统
通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集成电路芯片来进行控制操作,如图1所示。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。

2
遥控发射器及其编码
遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC的uPD6121G组成发射电路为例说明编码原理。当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。这种遥控码具有以下特征:
采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图2所示。

上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。然后再通过红外发射二极管产生红外线向空间发射,如图3所示。

UPD6121G产生的遥控编码是连续的32位
二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。该芯片的用户识别码固定为十六进制01H;后16位为8位操
作码(功能码)及其反码。UPD6121G最多额128种不同组合的编码。
遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间,图4为发射波形图。
当一个键按下超过36ms,振荡器使芯片激活,将
发射一组108ms的编码脉冲,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址
码(9ms~18ms),8位数据码(9ms~18ms)和这8位数据的反码(9ms~18ms)组成。如果键按下超过108ms仍未松开,接下来发射的
代码(连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。
代码格式(以接收代码为准,接收代码与发射代码反向)


注:代码宽度算法:
16位地址码的最短宽度:1.12×16=18ms 16位地址码的最长宽度:2.24ms×16=36ms
易知8位数据代码及其8位反代码的宽度和不变:(1.12ms+2.24ms)×8=27ms
∴32位代码的宽度为(18ms+27ms)~(36ms+27ms)
1.
解码的关键是如何识别“0”和“1”,从位的定义我们可以发现“0”、“1”均以0.56ms的低电平开始,不同的是高电平的宽度不同,“0”为
0.56ms,“1”为1.68ms,所以必须根据高电平的宽度区别“0”和“1”。如果从0.56ms低电平过后,开始延时,0.56ms以后,若读到
的电平为低,说明该位为“0”,反之则为“1”,为了可靠起见,延时必须比0.56ms长些,但又不能超过1.12ms,否则如果该位为“0”,读到的已
是下一位的高电平,因此取(1.12ms+0.56ms)/2=0.84ms最为可靠,一般取0.84ms左右均可。
2. 根据码的格式,应该等待9ms的起始码和4.5ms的结果码完成后才能读码。
如果邮购我们开发的51单片机试验板和扩展元件的网友,可以获得如上图所示的红外遥控手柄,这种遥控器的编码格
式符合上面的描述规律,而且价格低廉,有32个按键,按键外形比较统一,如果用于批量开发,可以把遥控器上贴膜换成你需要的字符,这为开发产品提供了便
利。
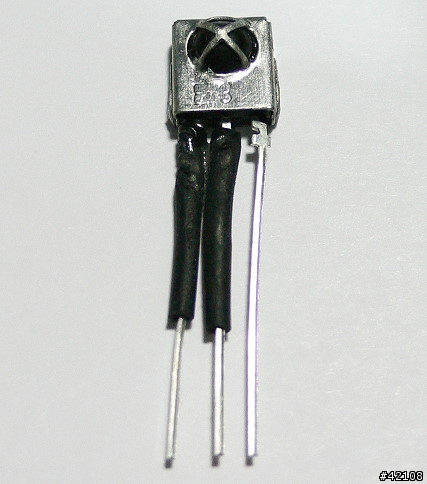
接收器及解码
一体化红外线接收器是一种集红外线接收和放大于一体,不需要任何外接元件,就能完成从红外线接收到输出与TTL电平信号兼容的所有工作,而体积和普通的塑封三极管大小一样,它适合于各种红外线遥控和红外线数据传输。
ORG 0000H
START:MOV P0,#0FFH
MOV P1,#0FFH
MOV
P2,#0FFH
MOV P3,#0FFH
JNB P3.2,$;等待遥控信号出现
MOV R6,#10
SB: ACALL
YS1;调用882微秒延时子程序
JB P3.2,START;延时882微秒后判断P3.2脚是否出现高电平如果有就退出解码程序
DJNZ
R6,
SB;重复10次,目的是检测在8820微秒内如果出现高电平就退出解码程序
;以上完成对遥控信号的9000微秒的初始低电平信号的识别。
JNB
P3.2, $ ;等待高电平避开9毫秒低电平引导脉冲
ACALL YS2 ;延时4.74毫秒避开4.5毫秒的结果码
MOV
R1,#1AH ;设定1AH为起始RAM区
MOV R2,#4
PP: MOV R3,#8
JJJJ: JNB
P3.2,$;等待地址码第一位的高电平信号
LCALL YS1;高电平开始后用882微秒的时间尺去判断信号此时的高低电平状态
MOV
C,P3.2;将P3.2引脚此时的电平状态0或1存入C中
JNC UUU;如果为0就跳转到UUU
JB
P3.2,$;如果为1就等待高电平信号结束
UUU: MOV A,@R1;将R1中地址的给A
RRC
A;将C中的值0或1移入A中的最低位
MOV @R1,A;将A中的数暂时存放在R1中
DJNZ
R3,JJJJ;接收地址码的高8位
INC R1;对R1中的值加1,换成下一个RAM
DJNZ R2,PP
;接收完16位地址码和8位数据码和8位数据反码,存放在1AH/1BH/1CH/1DH的RAM中
;以下对代码是否正确和定义进行识别
MOV
A,1AH;比较高8位地址码
XRL A,#00000000B ;判断1AH的值是否等于00000000,相等的话A为0
JNZ
EXIT;如果不相等说明解码失败退出解码程序
MOV A,1BH;比较低8位地址
XRL A,#11111111B
;再判断高8位地址是否正确
JNZ EXIT;如果不相等说明解码失败退出解码程序
MOV
A,1CH;比较数据码和数据反码是否正确?
CPL A
XRL A,1DH ;将1CH的值取反后和1DH比较
不同则无效丢弃,核对数据是否准确
JNZ EXIT;如果不相等说明解码失败退出解码程序
CLR
P2.7;解码成功发光二极管点亮指示!
AJMP BIJIAO
;判断在118毫秒内是否有连发码
AA:MOV R1,#25
XX:ACALL YS2
JNB
P3.2,HH;跳转到判断连发代码是否正确的程序段
DJNZ R1,XX
EXIT: MOV
P0,#0FFH;对所有端口清零
MOV P1,#0FFH
MOV P2,#0FFH
MOV P3,#0FFH
AJMP
START
;连发码判断程序段-----------
HH:MOV R6,#4
S: ACALL YS1;调用882微秒延时子程序
JB
P3.2,EXIT;延时882微秒后判断P3.2脚是否出现高电平如果有就退出解码程序
DJNZ R6,
S;重复4次,目的是确认连发码的低电平信号波形
JNB P3.2, $ ;等待高电平
AJMP AA
BIJIAO:MOV A,1CH;按键数值判断执行
CJNE A,#00000101B,TT1
CPL P0.0
TT1:
CJNE A,#00000100B,TT2
CPL P0.1
TT2: CJNE A,#00010000B,T3
CPL
P0.2
T3: CJNE A,#01001101B,T5
CPL P0.3
T5: CJNE
A,#01001110B,T6
CPL P0.4
T6: CJNE A,#01001100B,T7
CPL P0.5
T7:
CJNE A,#00001001B,T8
CPL P0.6
T8: CJNE A,#00011101B,T9
CPL
P0.7
T9: CJNE A,#00011111B,T10
CPL P2.6
T10: CJNE
A,#00001101B,T11
CPL P2.5
T11: CJNE A,#00011001B,T12
CPL
P2.4
T12: CJNE A,#00011011B,T13
CPL P2.3
T13: CJNE
A,#00010001B,T14
CPL P2.2
T14: CJNE A,#00010101B,T15
CPL
P2.1
T15: CJNE A,#00010111B,T16
CPL P2.0
T16: CJNE
A,#00010010B,T17
CPL P1.0
T17: CJNE A,#00010110B,T18
CPL
P1.1
T18: CJNE A,#01011110B,T19
CPL P1.2
T19: CJNE
A,#01011101B,T20
CPL P1.3
T20: CJNE A,#01011100B,T21
CPL
P1.4
T21: CJNE A,#01001111B,T22
CPL P1.5
T22: CJNE
A,#00000001B,T23
CPL P1.6
T23: CJNE A,#00000011B,T24
CPL
P1.7
T24: CJNE A,#00000000B,T25
CPL P3.0
T25: CJNE
A,#00010100B,T26
CPL P3.1
T26: CJNE A,#00011110B,T27
CPL
P3.3
T27: CJNE A,#00011010B,T28
CPL P3.4
T28: CJNE
A,#00001111B,T29
CPL P3.5
T29: CJNE A,#00001010B,T30
CPL
P3.6
T30: CJNE A,#00001110B,OK
CPL P3.7
OK:AJMP AA
YS1: MOV
R4,#20 ;延时子程序1,精确延时882微秒
D1: MOV R5,#20
DJNZ R5,$
DJNZ R4,D1
RET
YS2: MOV R4,#10 ;延时子程序2,精确延时4740微秒
D2: MOV R5,#235
DJNZ
R5,$
DJNZ R4,D2
RET
END
[很好DIY] WinLIRC電腦萬用紅外線遙控器
[什麼是 WinLIRC ]
WinLIRC是一個以 LIRC為基礎而在Windows環境發展出來的模組, 而什麼是LIRC呢...它其實是 Linux Infrared
Remote Control的縮寫, 本來是在Linux下所發展出來的一個紅外線的遙控模組. 如果有喜歡Linux的大大可以到 http://www.lirc.org逛逛, 那裡面有一堆看都看不完的資料.
而因為我以Windows環璄為主, 所以當然就以WinLIRC為主要支援的對象了.
[為什麼是 WinLIRC]
市面上有很多給PC用遙控器(上Y拍找可以找到一堆)...為什麼獨鍾WinLIRC呢..原因原簡單.
1. 它是免費的.
2. 它使用的線路及零件非常簡單, 不用花太多的金錢(基本上不會超過50元台幣)
3. 它可以使用大部分的現有遙控器(你可以買一支300元的KTV專用遙控器也可以直接用你的電視遙控器來當WinLIRC的遙控器)
4. 它可以記錄(學習)N支遙控器.
5. 它可以用網路來遙控遠方的程式.
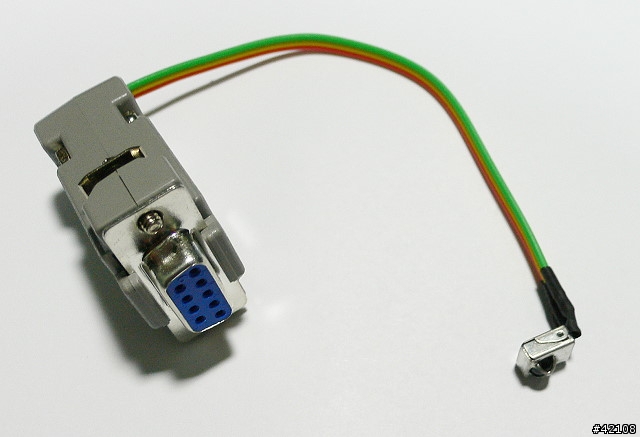
[線路]
WinLIRC可以用很多不同的電路來達到遙控的目的(當然都要透過RS-232C), 而我們就找最簡單的電路來製作就可以用了, 零件非常少(比對岸的某的電路都要少很多).
現在就來看看電路圖(電路不是我設計的, 是由 LIRC.org來的, 我只是重繪了一下而已)
右方RS-232C 對應D9 的接腳是
DCD ------- Pin 1 信號輸入
RTS ------- Pin 7 電源供應 Vcc
GND ------ Pin 5 接地
註: 圖面上的紅外線接收器我已經改成台灣比較容易買到的6038LM-5A了, 當然如果你有其它接收能力更好的相容接收器, 也可以使用.
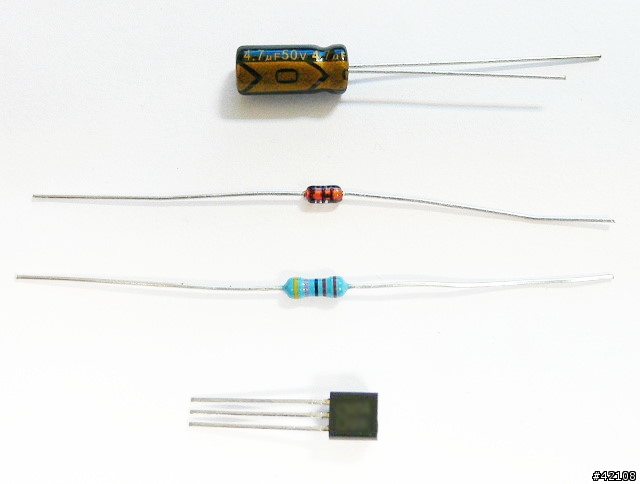
零件如下, 我會把我買的價格(光華價)標上去:
1. 6038LM-5A 紅外線接收....... 我買28元1個
2. 電解電容 4.7uF/50V ...... 5元可以買一堆
3. 1N4148 二極體 ............. 10元可以買一堆
4. 電阻 1/4W 4.7K歐姆 ...... 5元可以買一堆
5. LM78L05 100mA穩壓IC.. 忘了多少錢...但不到15元
6. RS-232 D9 母頭一個

接頭上有標明第幾Pin, 因為我們只用到 1, 5, 7 3個支腳, 焊的時候要小心
7. D9接頭外殼一個
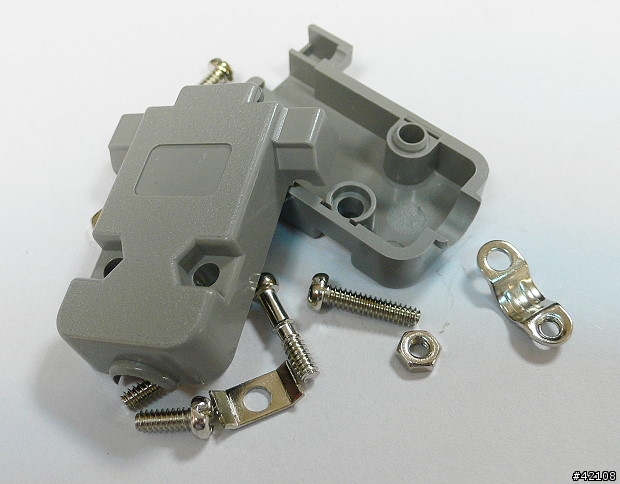
8. 網路線一小段(其實只要3Pin的線即可..只是我手頭上別的沒有網路線一堆...所以就剪了條網路線來用)
以上零件總會不會超過新台幣50元, 只是有些一次要買一堆, 不過可以留著以後可以用
其中 6038LM 找一下DataSheet (咕狗大神真方便...)得知腳位為:
Pin1 : Vout .... 信號輸出
Pin2 : GND .... 接地
Pin3 : Vcc ..... +5V
來源: 6038LM-5A DataSheet
而 78L05 是所謂 TO-92封裝, 腳位說明如下圖:
來源 : LM78L05 DataSheet
因為零件沒有多少..所以連萬用板都省起來..如果有經驗的大大可以直接焊在RS-232 D9 接頭內.
或者...像這樣
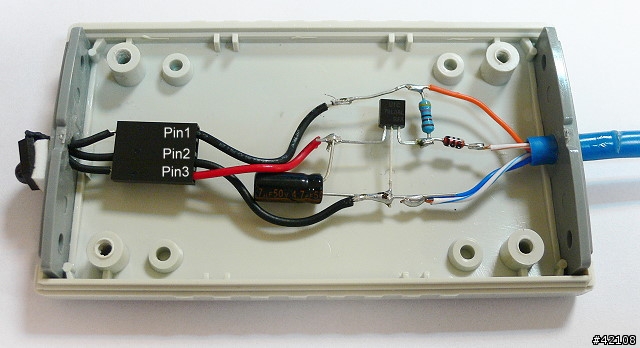
因為我剛好兩種都各做了一個...所以才有圖可看..

注意事項:
1. 6038LM 和 78L05 腳位不要弄錯了.
2. 1N4147 二極體和 4.7uF電解電容都有極性不要焊反了.
等到萬事俱備後...我們就要開始WinLIRC的使用了...
啊~~~~~~我的NB沒有RS-232C怎麼辦呢...有些大大可能要用在NB上但, NB通常沒有RS-232的接頭..那要怎麼辦...那就真的沒辦法了

目前LIRC官方也還對USB Serial說目前是不行的.....
 )
)=======================================================
硬體的部分解決了...現在就是軟體的部分了... 首先請到 WinLIRC的首頁去下載WinLIRC的程式
目前最新的版本是 0.6.5
下載點: http://prdownloads.sourceforge.net/winlirc/winlirc-0.6.5.zip?download
解壓縮後你會發現一拖拉庫的檔案...不要被嚇到.. 幾乎都是 Source Code. 我們需要的只有
 及 一個 Sample.cf 這兩個檔而已...不要懷疑..它是綠色軟體..免安裝直接執行.
及 一個 Sample.cf 這兩個檔而已...不要懷疑..它是綠色軟體..免安裝直接執行.可以的話把這兩個檔獨立開個資料夾(如c:\WinLIRC)來放
首先把我們剛剛的硬體裝上去..要知道裝在那個Com埠喔.. 如果不知道是COM幾. 請找 "好人" 處理.
現在直接執行 WinLirc.exe , 哇..怎麼出現
沒關係...因為它是一個Winsock的 Service所以會被XP的防火牆給檔下來, 請按解除封鎖繼續
哇..又來一個
沒關係第一次一定會這樣..按確定即可, 然後會看到下面的畫面
首先把Port欄位設定成你的COM埠, 下拉式選單可以選到COM8, 如果超過, 可以直接輸入即可不用理會選單.
[硬體測試]
怎麼知道硬體工作正不正常.....當然要測試一下了, 設定好COM埠後
按下下方 Config 右方的 Browse... 鈕. 選擇 Sample.cf 檔
再按下右方的 Raw Code鈕 會出現一個叫 Learn Rmote的視窗. 然後隨便拿著一個遙控器對著 6038LM的接收窗按按看. 如果
那個 視窗會隨著按鈕而出現一堆pulse , space...(如下圖) 那麼硬體己測試成功..請關閉這個視窗, 接下來可以開始學習遙控器了.
[學習遙控器]
好..回到主視窗後..我們要開始學習了..
首先我們要開一個新的檔案來學習, 在下方 Config 的檔名處改個檔名 (如 Test.cf)
再按下 Learn 鈕
學習步驟
1. 按下 Learn之後出現下面的畫面, 請輸入遙控器的名稱後按 Enter鈕
2. 接下來有2個畫面, 要輸入遙控器的特性, 因為我們並不知道..所以我們都直接按Enter讓WinLIRC自行檢查
3. 接下來這個畫面, 請按下想學習的遙控器上的某一鍵, 然後按照上面的指示需要按10次左右
按了鍵, 系統抓到, 請你再按一次
有沒有看到中間有句 "Did not get....." 表示這次按的不成功, 還要再按一次直到出現10Left
出現10Left表示要再記錄10次..那麼..就按吧..10.9.8.7.6.5.哇失敗..4.3.2.1. 成功了
這個步驟主要是讓WinLIRC了解這支遙控器的特性, 如果一直不成功..可能是你的遙控器碼太複雜(通常有些日本的遙控器會有這個現象), 換一支吧. 如果錯誤太多..系統可是會出現錯誤太多訊息, 而回到主選單的喔.
撇步:按鍵時可以稍稍按久一點..成功率會高一點.
4. 再來開始要學習按鍵了喔.
先輸入想學習的按鍵名
再來按下想學習的按鈕..會出下圖的畫面, 其中有個 matches=?, faults=?
也就是說要每個按鈕要按到matches=7 才行..所以要多按幾次
經過7次成功match後..出現是否要Keep這個按鍵, 當然是按 是 囉
接下來又回到第4的步驟開始, 輸入第2個鍵的按鍵名..
依此類推把所有的接鍵全都學習完為止.
最後還是會回到輸入按鍵名稱的畫面, 如果已經學習完畢了, 則不需要輸入任何名稱直接按Enter即可
5. 當結束按鍵的學習後, 系統會請你不要忘了按 analyze 鈕 來整理剛剛學習的資料
6. 所以我們當然照著作囉..一切成功的話
至此..學習的動作已經完成
請在主畫面 按下 OK 鈕, 這時WinLIR會自動跑到右下方變成一個圓形圖示去, 此時如果按一剛剛學習的遙控器的鈕, 你會發現 WinLIR的圓形圖示會變綠色的. 這表示遙控接收正常.
接下來, 我們要來測試一下剛剛學習的按鍵了, 請按 開始鈕, 再選執行(如下圖), 輸入 telnet localhost 8765
會出現一個 Telnet的視窗..現在按一下剛剛的按鍵看看. 你會發現Telnet視窗內會有 按鍵碼-按鍵名-遙控器名.....至此...大大的成功.
現在我們已經完成一支遙控器了, 如果要再學習另一支遙控器那麼請重新再來一次即可
但要注意的是. Config的檔名不能一樣, 不然原來的遙控器資料會被蓋掉.
也就是說學習的時候是一個遙控器一個檔案.
而是不是可以同時使用2個以上的遙控器呢, 答案當然也是可以的.
其實所有的遙控器檔案都是文字檔, 所以你把副檔名設定成.txt也可以.
你只要打開每個遙控器檔, 把從 begin remote 一直到 end remote 全部複製到另一個檔案內.
然後把那個檔案存檔, 再執行WinLIRC, 用 browse... 鈕 選擇那個檔案即可.
當WinLIRC正確運作後..以後直接執行WinLIRC即會自動載入最後的那個Config檔, 並自動縮到右下方在背後默默的工作著.
[在JetKTV使用 WinLIRC遙控器]
首先請把JetKTV.ini 檔案內 [WinLirc]區中的 Enable 設為 Yes
[WinLirc]
Enable=Yes
Host=localhost
存檔後執行JetConfig
再到設定鍵盤及遙控器的功能內按下學習鈕, 即可一個一個按下遙控器鈕把功能給設定好了.
祝大家用的快樂....
看看時間...又天亮了...補眠企~~~~~~~
Arduino扩展板使用之RS485接口篇
RS485采用差分信号负逻辑,+2V~+6V表示“0”,- 6V~-
2V表示“1”。RS485有两线制和四线制两种接线,四线制只能实现点对点的通信方式,现很少采用,现在多采用的是两线制接线方式,这种接线方式为总线
式拓朴结构在同一总线上最多可以挂接32个结点。在RS485通信网络中一般采用的是主从通信方式,即一个主机带多个从机。很多情况下,连接RS-485
通信链路时只是简单地用一对双绞线将各个接口的“A”、“B”端连接起来。其理论的通讯距离是1200米,速率高达20Mbps,并可以用在强噪声的环境
中正常工作,在工业通讯领域中被广泛应用。
RS485通讯的点对点接法和主从机接法如下图:

以上2种接法建议都接上地线,以保证减小干扰。在主从网络中,通讯线必须手牵手地并联下去,不可以有星型连接或者分叉。
RS485协议只是把TTL的串口转换成差分方式的通讯接口,485芯片的端口还是接到Arduino的RX(PIN0)和TX(PIN1)端,两线制的
RS485是属于半双工网络,则需要有个端口来控制AB差分线上何时收何时发,这就会用到Arduino上的PIN2。Arduino扩展板上需要插上
485接口选择插针,红圈处的3个插针都要插上:

完成上面的操作,我们就可以玩代码了,2个简单的代码:
主机代码:
int EN = 2;
void setup()
{
pinMode(EN, OUTPUT);
Serial.begin(19200);
}
void loop()
{
// send data
digitalWrite(EN, HIGH);//使能发送
Serial.print('A');
delay(1000);
}
从机代码:
int ledPin = 13;
int EN = 2;
int val;
void setup()
{
pinMode(ledPin, OUTPUT);
pinMode(EN, OUTPUT);
Serial.begin(19200);
}
void loop()
{
// receive data
digitalWrite(EN, LOW);//使能接收
val = Serial.read();
if (-1 != val) {
if ('A' == val) {
digitalWrite(ledPin, HIGH);
delay(500);
digitalWrite(ledPin, LOW);
delay(500);
}
}
}
代码编译后,分别下载到2个Arduino中(下载代码时请拔掉上图所示的485接口选择插针,因为它要占用串口,导致
下载失败),然后连接2个扩展板上的485接口,A-A,B-B,GND-GND。主机Arduino模块会向从机不停的发送字母A,然后从机接收到字母
A,并使数字PIN13上的发光二极管闪烁。

